Arduino第二十二課(機器人、自走車)
宜蘭縣竹林國小 陳金助老師
2015年學生做的專題作品
三位五年級學生從無到有的創作

題目是製作一個跟光有關的玩具
學生討論後提出想法

畫出草圖

修改後做出作品,再修改

原理說明



作品特色






——————————
作品創作詳細說明:
主要材料:
自走車底盤X1、伺服馬達X2、光敏電阻X14、1K歐姆的電阻X14、繼電器模組X2、小開關X1、麵包板(或萬用電路板)、LED燈條、電池及外接盒、紙箱、影印紙、畫筆、鐵絲、電線、熱熔膠槍、焊錫、烙鐵
1.使用14個光敏電阻當作控制開關,接收雷射筆的光當作訊號來做動作。接線及原理請參考第十課(光敏電阻)。
2.手臂使用伺服馬達控制,接線及原理請參考第十一課(伺服馬達)。
3.LED燈條需要12V電源,Arduino控制板的輸出訊號無法直接驅動,所以透過繼電器模組來控制LED燈條的閃亮。接線及原理請參考第十七課(繼電器)。
4.下面(腳)使用自走車底盤,動力就是直流減速馬達,Arduino控制板的輸出訊號無法直接驅動馬達,需要使用一個L298N 馬達驅動板來協助。


12V連接外部電源,也可以直接連接Arduino板的Vin
GND接Arduino板的GND
5V接Arduino板的5V
IN1~IN4分別接Arduino板的數位腳,例如:D8~D11
OUT1、OUT2接左邊馬達
OUT3、OUT4接右邊馬達
直流馬達 | 旋轉方式 | IN1 | IN2 | IN3 | IN4 |
M1 | 正轉 | 高 | 低 | – | – |
反轉 | 低 | 高 | – | – | |
停止 | 低 | 低 | – | – | |
M2 | 正轉 | – | – | 高 | 低 |
反轉 | – | – | 低 | 高 | |
停止 | – | – | 低 | 低 |
利用Arduino的數位腳來發出訊號,控制左、右馬達的正、反轉,讓機器人前、後、左、右移動。
5.聲音:接上蜂鳴器,由程式控制發出音樂。接線及原理請參考第七課(蜂鳴器)
6.因為接收及控制的腳位數量多,所以使用2片Arduino板,將手及腳的控制分開處理。
7.使用mblock寫好程式後上傳到Arduino(請參考第十二課(離線執行)),外接電池,就可以離線趴趴走了。
學生簡報
程式說明:
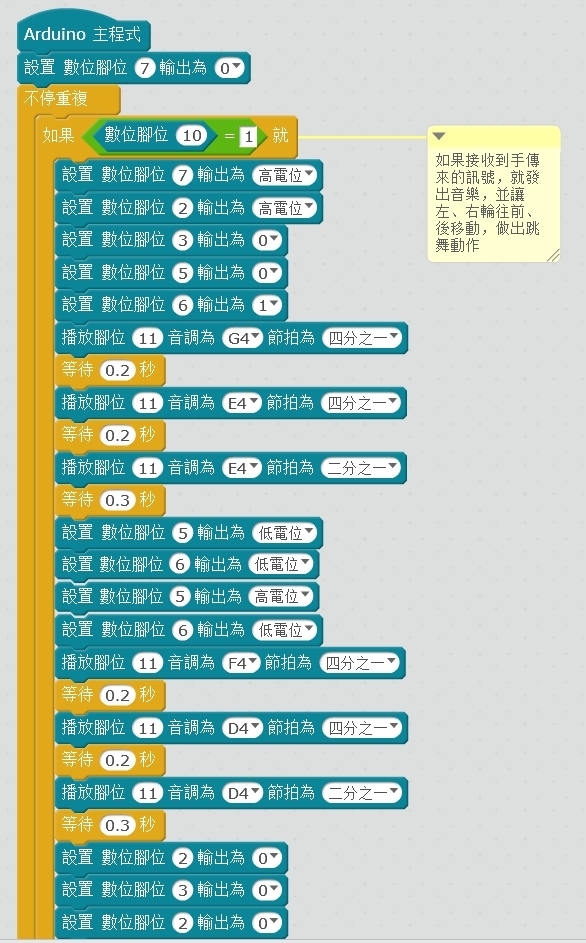
第一片Arduino板,手的程式

播放完開機音樂後,開始不停的偵測光敏電阻是否有接收到雷射光的訊號,如果有訊號,就做動作。不同的光敏電阻接收到訊號,就做不同的動作。

第一片Arduino板,腳(輪子)的程式
一樣不停的偵測光敏電阻是否有接收到雷射光的訊號,如果有訊號,就做動作。不同的光敏電阻接收到訊號,就做不同的動作。
配合手的程式,可以做一些組合動作。
————————–
相關連結:
國中小學生外部感應器初體驗:Arduino軟硬體選擇建議
http://blog.ilc.edu.tw/blog/blog/868/post/93477/626724
Arduino初級班課程目錄
http://blog.ilc.edu.tw/blog/blog/868/post/93477/605771
Arduino課程準備
http://blog.ilc.edu.tw/blog/blog/868/post/93477/599681
Arduino第一課(概論、連接)
http://blog.ilc.edu.tw/blog/blog/868/post/93477/599732