Arduino第十三課(超音波感測器)
宜蘭縣竹林國小 陳金助老師
超音波感測器:主要有一個超音波發射器和一個接收器組成。
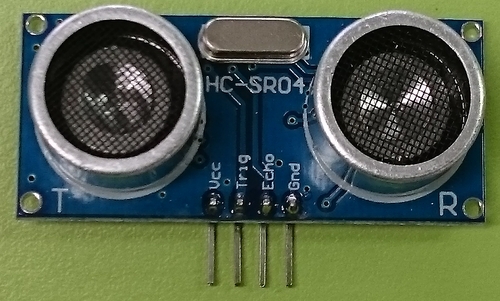
左邊T是發射器,會發出40 kHz 的超音波;右邊R是接收器,接收反射回來的超音波。
PS:聲音原理請參考http://blog.ilc.edu.tw/blog/blog/868/post/2172/127343
HCSR04超音波感測器特性:
1.感應角度:不大於15度
2.探測距離:2cm-450cm
3.感測器有四個接腳:接線方式為Vcc接5V,Gnd接地,Trig(控制端)和Echo(接收端)。
一、倒車雷達
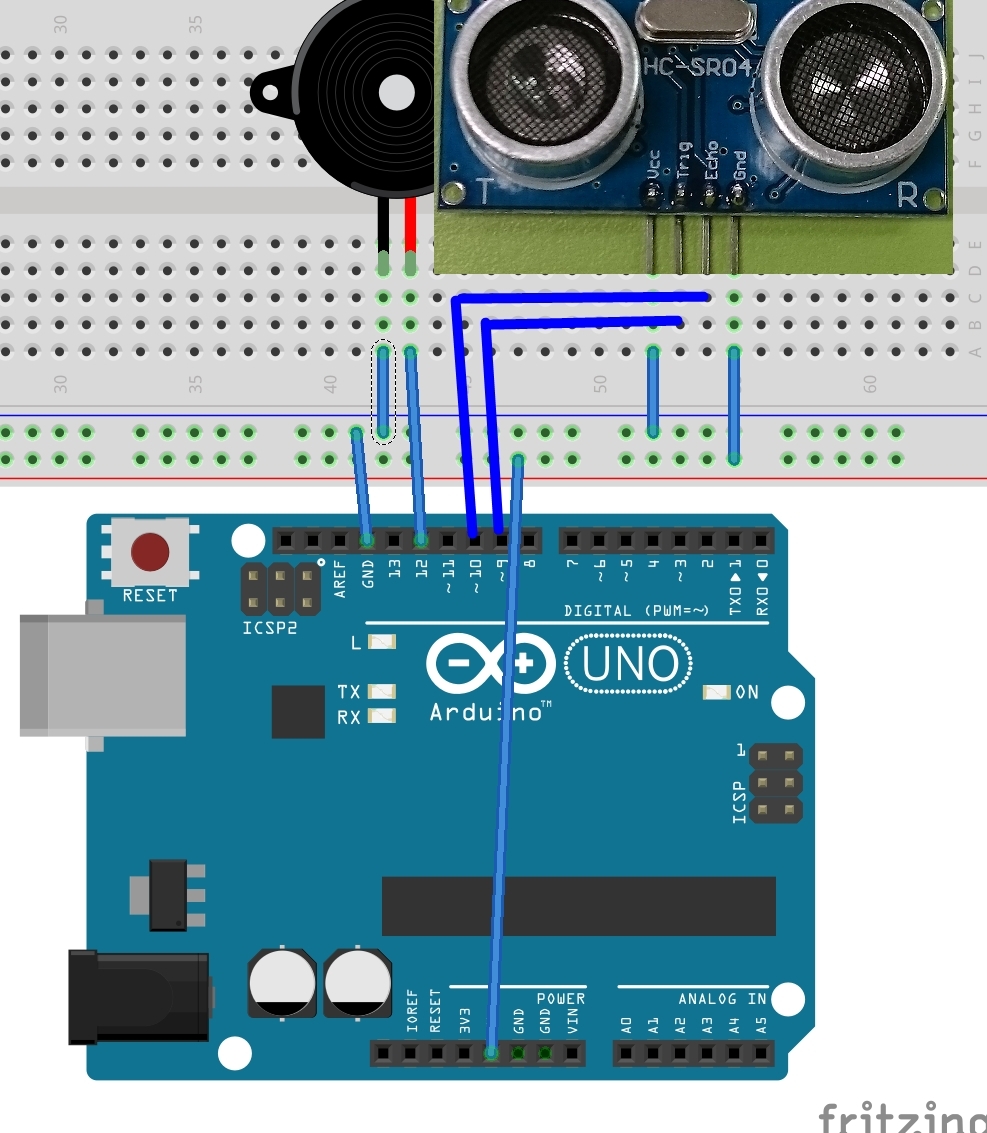
超音波感測器的Vcc接5V,Gnd接地,Trig接腳位9,Echo接腳位10
蜂鳴器正極(長腳)接數位腳D12,負極接GND
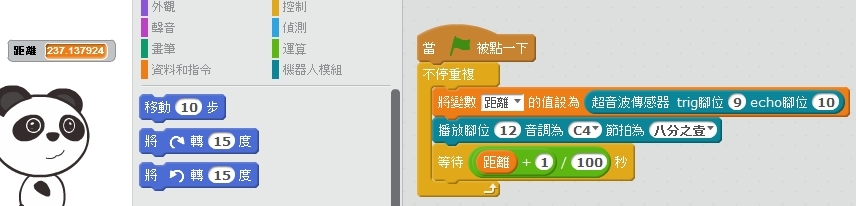
使用 [超音波感測器]指令可以偵測感測器的偵測結果。
將變數值設為偵測結果,然後播放一個聲音。
使用[等待]指令來間隔[都都聲]的快慢,當距離愈近時,數值愈小,都聲愈快;距離遠,都聲間隔就長。
因為數值從2、3百到0,所以要做一些換算,才不會都聲等太久或亂響。
程式下載:倒車雷達.sb2
二、物品偵測
1.當偵測到物體靠近時,LED燈亮,物體遠離,LED暗。
接線如上圖,將蜂鳴器改成LED和電阻(參考第二課LED)
程式設計請參考上面修改。
2.
https://youtube.com/watch?v=qRgWttqFKu8
將超音波感測器裝在垃圾桶中,當垃圾丟進去後,感測器感應到就可以觸發訊號,讓喇叭發出聲音。
3.延伸:
可當作廁所的自動沖水小便斗的感應器。(一般都是使用紅外線感測器)
三、避撞感應
型狀像兩顆眼睛,製作機器人時,常常拿來做造型,裝在機器人或自走車上,用來偵測距離,作為避撞感測運用。
文章來源:Arduino第十三課(超音波感測器) 由 roc 發表。