TT直流減速馬達驅動板(L298N、L9110S)
自走車底盤套件,常見的動力就是TT直流減速馬達。
Arduino控制板的輸出訊號無法直接驅動馬達,需要使用馬達驅動板來協助。
目前常用的馬達驅動板有(L298N、L9110S)兩種
——————
L298N
—————


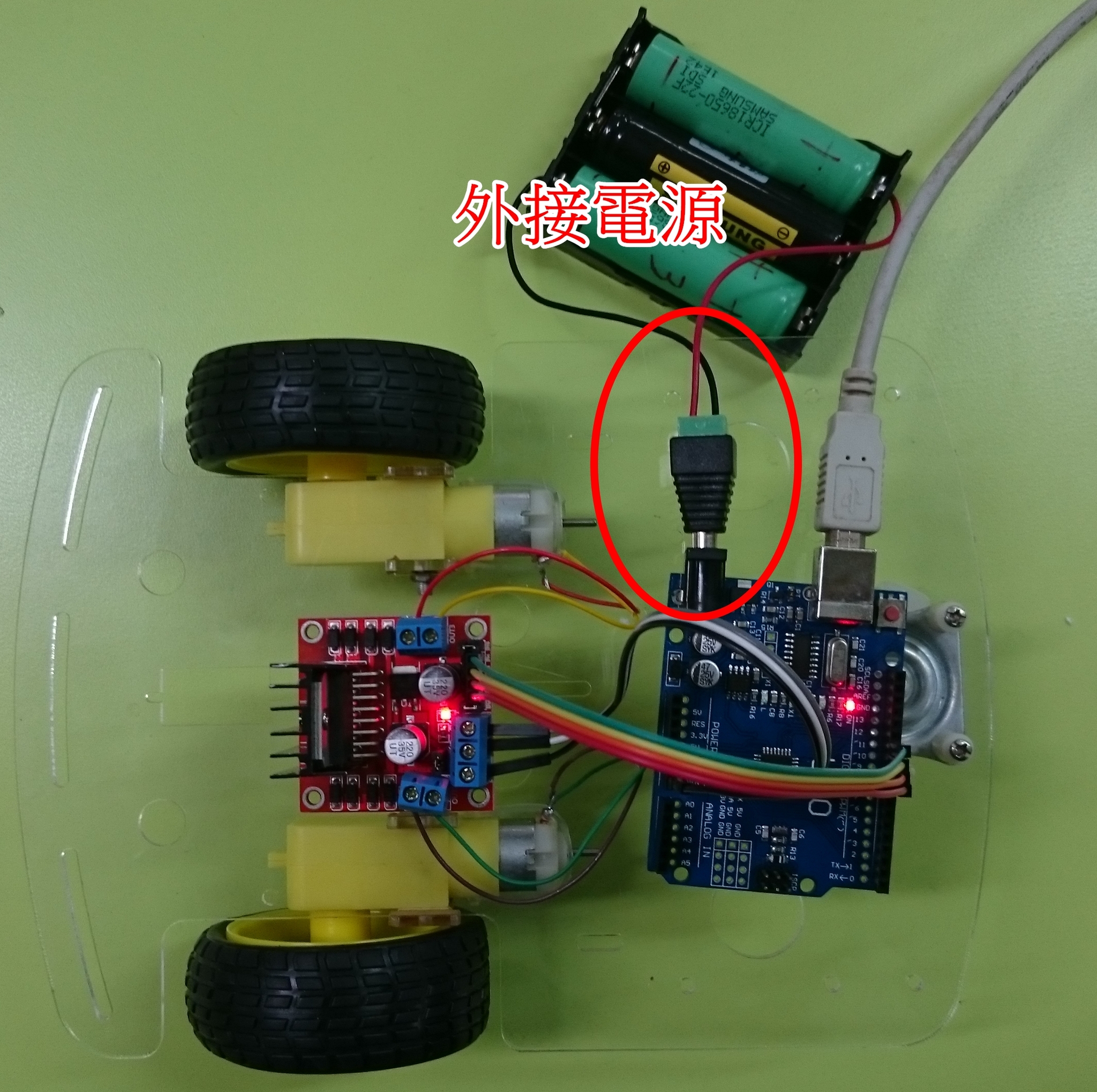
12V連接外部電源(直接連接Arduino板的Vin,錯誤示範)。
正確的作法,應該要分開2組電源分別接L298N和Arduino。
Arduino供電:電池組接圓形的電源輸入插座,或5V行動電源接USB連接埠
L298N供電:電池組(8V以上)另外12V,負極接GND
GND接Arduino板的GND
5V接Arduino板的5V
IN1~IN4分別接Arduino板的數位腳,例如:D5、D6、D9、D10
OUT1、OUT2接左邊馬達
OUT3、OUT4接右邊馬達
直流馬達 | 旋轉方式 | IN1 | IN2 | IN3 | IN4 |
M1 | 正轉 | 高 | 低 | – | – |
反轉 | 低 | 高 | – | – | |
停止 | 低 | 低 | – | – | |
M2 | 正轉 | – | – | 高 | 低 |
反轉 | – | – | 低 | 高 | |
停止 | – | – | 低 | 低 |
可以利用Arduino的數位腳來發出訊號,控制左、右馬達的正、反轉,讓小車前、後、左、右移動。
注意:
因為馬達的耗電量很大,容易造成連線當掉,最好另外接電源供電。
————————-
L9110S
——————
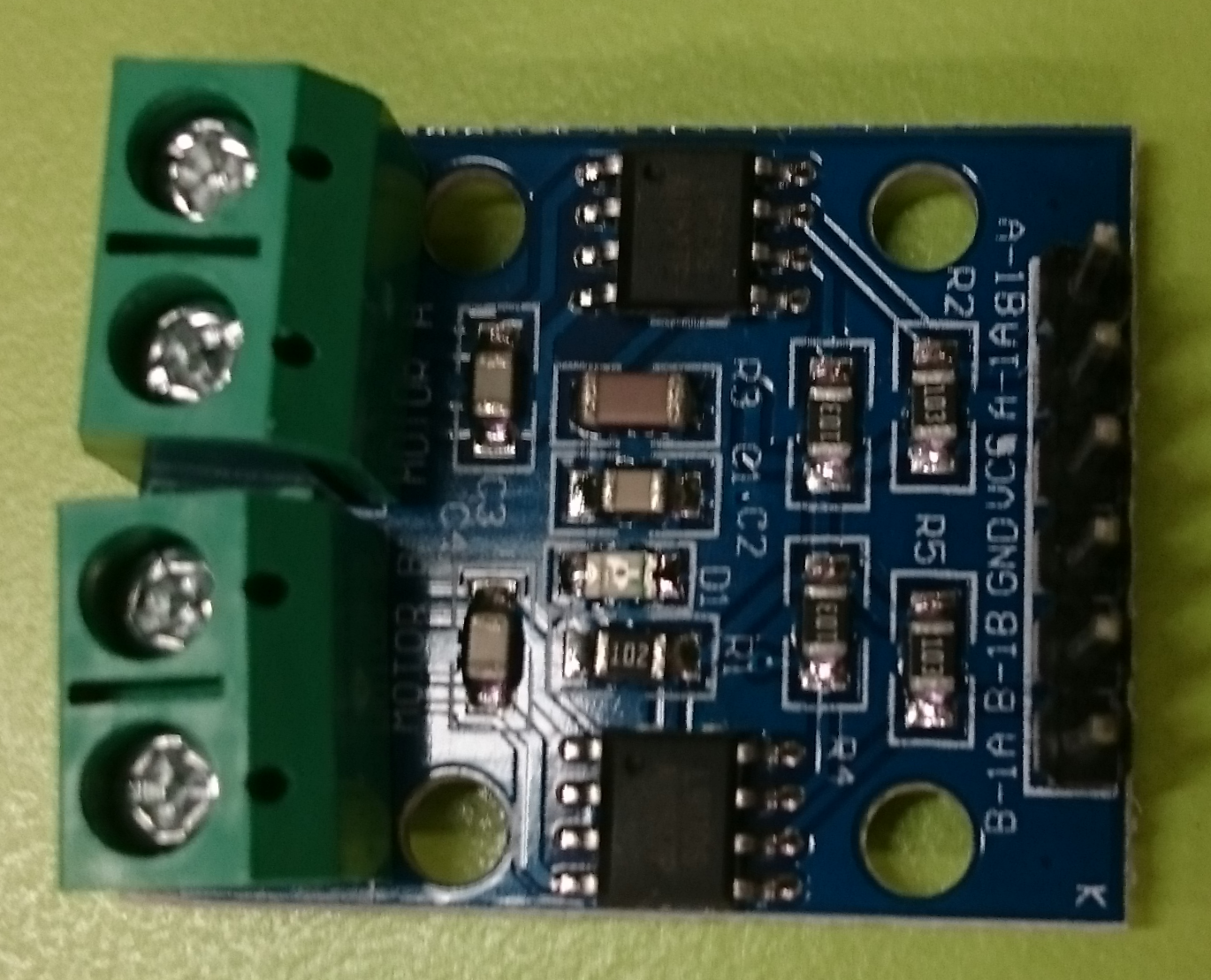
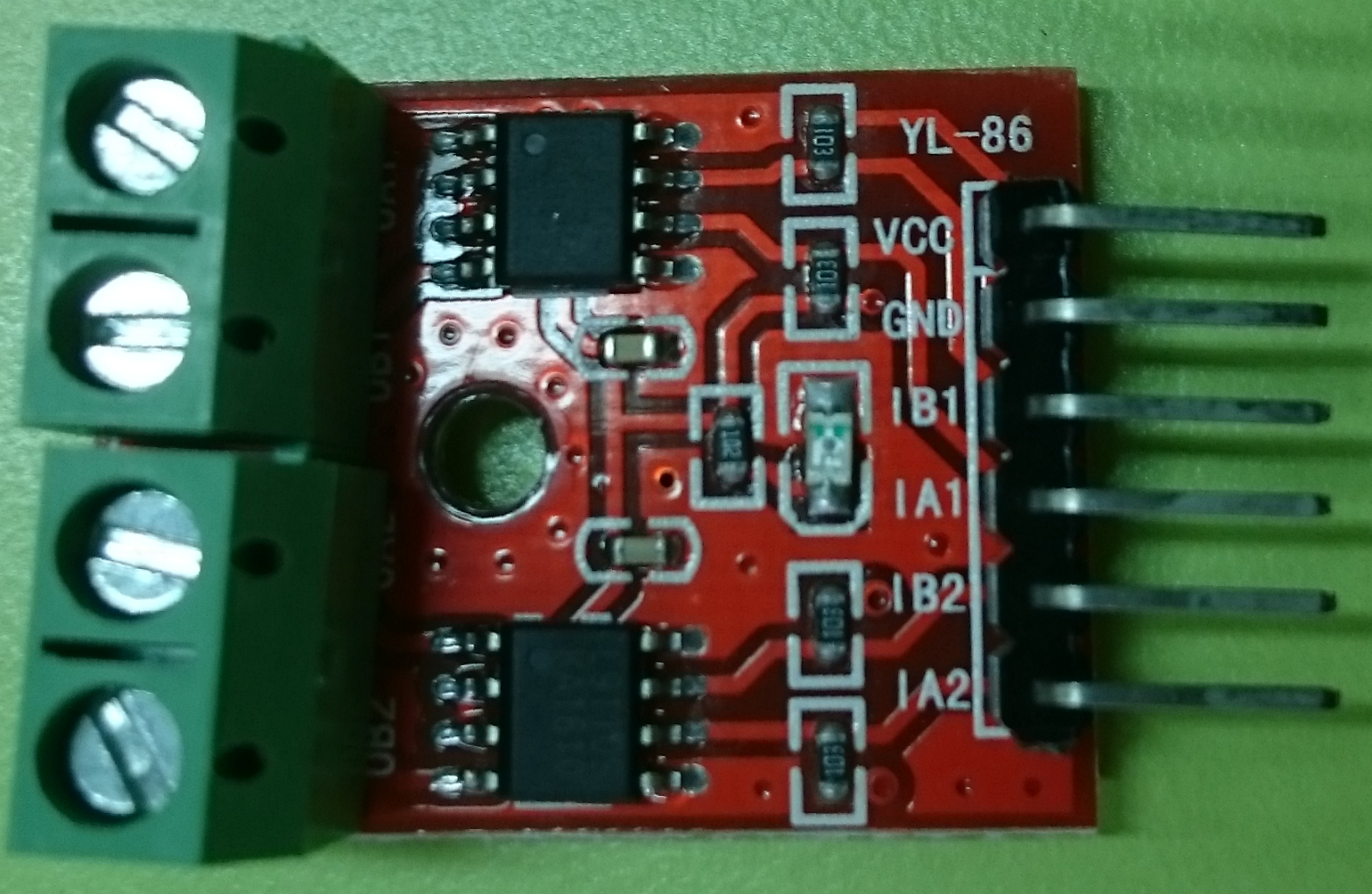
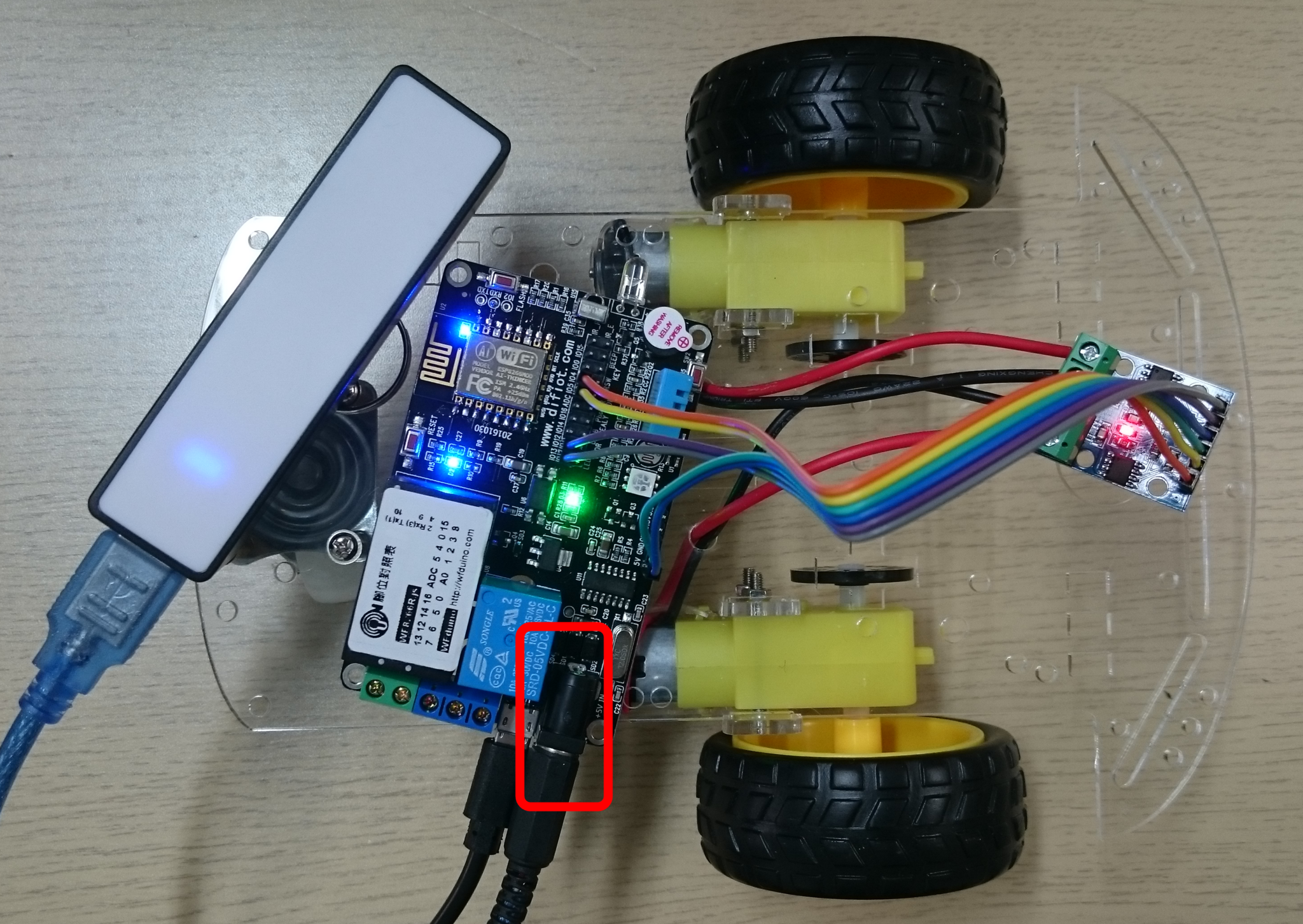
市面上常見的L9110S有上面兩種形式,兩種L9110S的訊號線接頭位置不一樣,請注意看清楚。
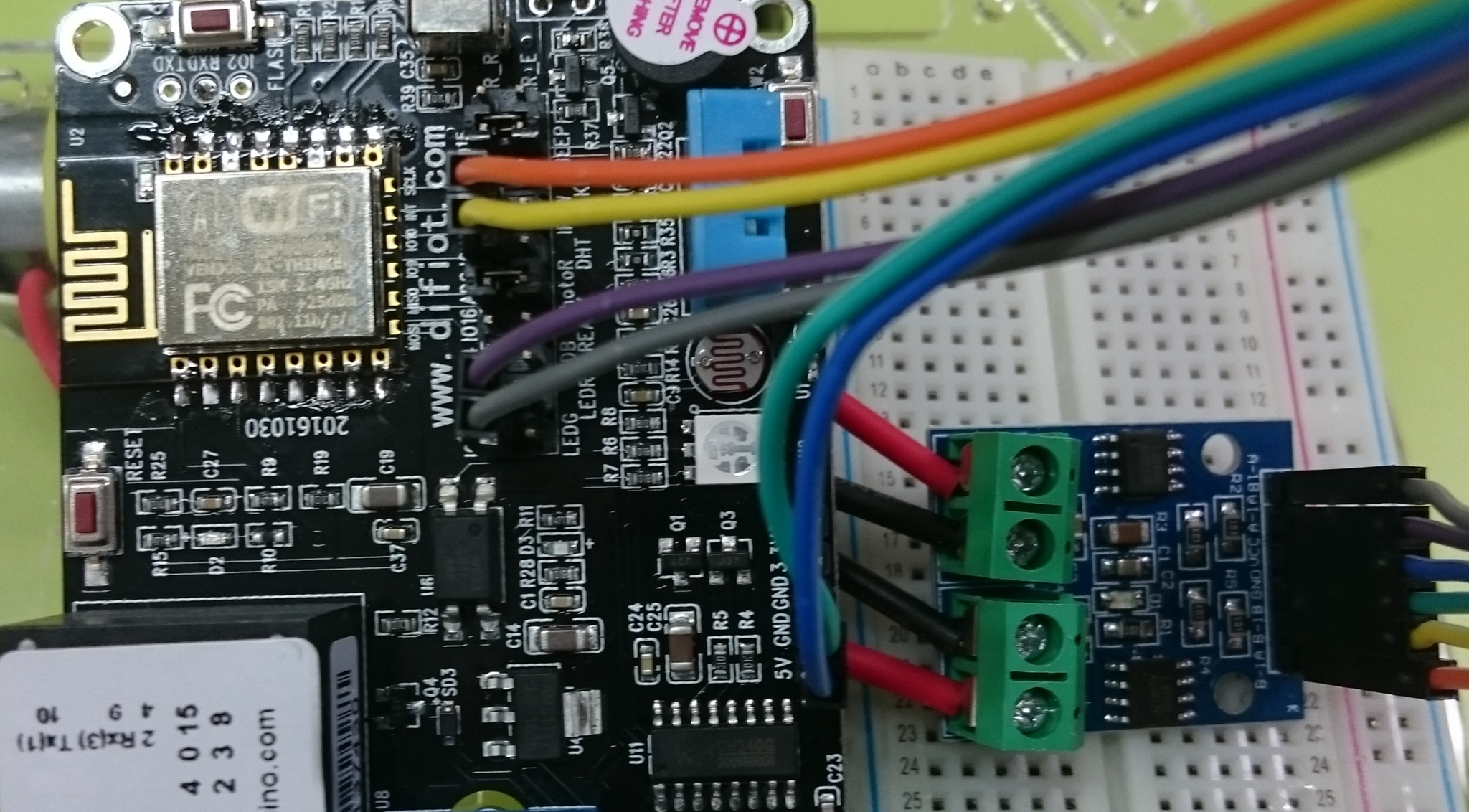
(照片是用DIFI示範)
L9110S左邊分別接小車兩邊的直流減速馬達A和B的兩個接頭,右邊接Arduino板的數位腳。
A-1A、A-1B分別接D2、D3
B-1A、B-1B分別接D6、D7
GND接GND(錯誤示範,可能會燒掉)。
VCC接5V(錯誤示範,可能會燒掉)。
正確的作法,應該要分開2組電源分別接L298N和Arduino。
Arduino供電:電池組接圓形的電源輸入插座,或5V行動電源接USB連接埠
L9110S供電:電池組(或5V行動電源)另外正極接VCC,負極接GND
GND接Arduino板的GND
5V接Arduino板的5V
注意:
因為馬達的耗電量很大,容易造成連線當掉,最好另外接電源供電。
(照片是用DIFI示範)
各腳位的輸出值高低請參考下表調整。
直流馬達 | 旋轉方式 | A-1A | A-1B | B-1A | B-1B |
M1 | 正轉 | 高 | 低 | – | – |
反轉 | 低 | 高 | – | – | |
停止 | 低 | 低 | – | – | |
M2 | 正轉 | – | – | 高 | 低 |
反轉 | – | – | 低 | 高 | |
停止 | – | – | 低 | 低 |
1.利用和Arduino板的數位(或類比)腳位發出訊號,控制左、右馬達的正、反轉,讓小車前、後、左、右移動。
2.外接電源可以讓小車行走更順暢。
3.因為接線關係,馬達正轉、反轉跟小車前進方向可能會有不同,實際使用時請自行調整輸出腳位即可。
————————
相關連結:
WFduino第二十課(遙控車)(L298N 馬達驅動板)
http://blog.ilc.edu.tw/blog/blog/868/post/97509/648422
新DiFi第18課無線自走車(L9110S 直流馬達驅動模塊)
http://blog.ilc.edu.tw/blog/blog/868/post/104089/681767
iL學習板課程目錄
http://blog.ilc.edu.tw/blog/blog/868/post/111175/727272
WFduino(Arduino)課程目錄
http://blog.ilc.edu.tw/blog/blog/868/post/97509/641433
新DiFi課程目錄
http://blog.ilc.edu.tw/blog/blog/868/post/104089/678192

