WFduino藍芽循跡車
使用WFduino搭配藍芽模組+紅外線避障模組來控制arduino自走車。
硬體:chromebook、win7、Mac都可以 + arduino UNO + HC-06藍芽模組+紅外線避障模組+小車
軟體:Scatch2.0(線上或離線都可以)+WFduino
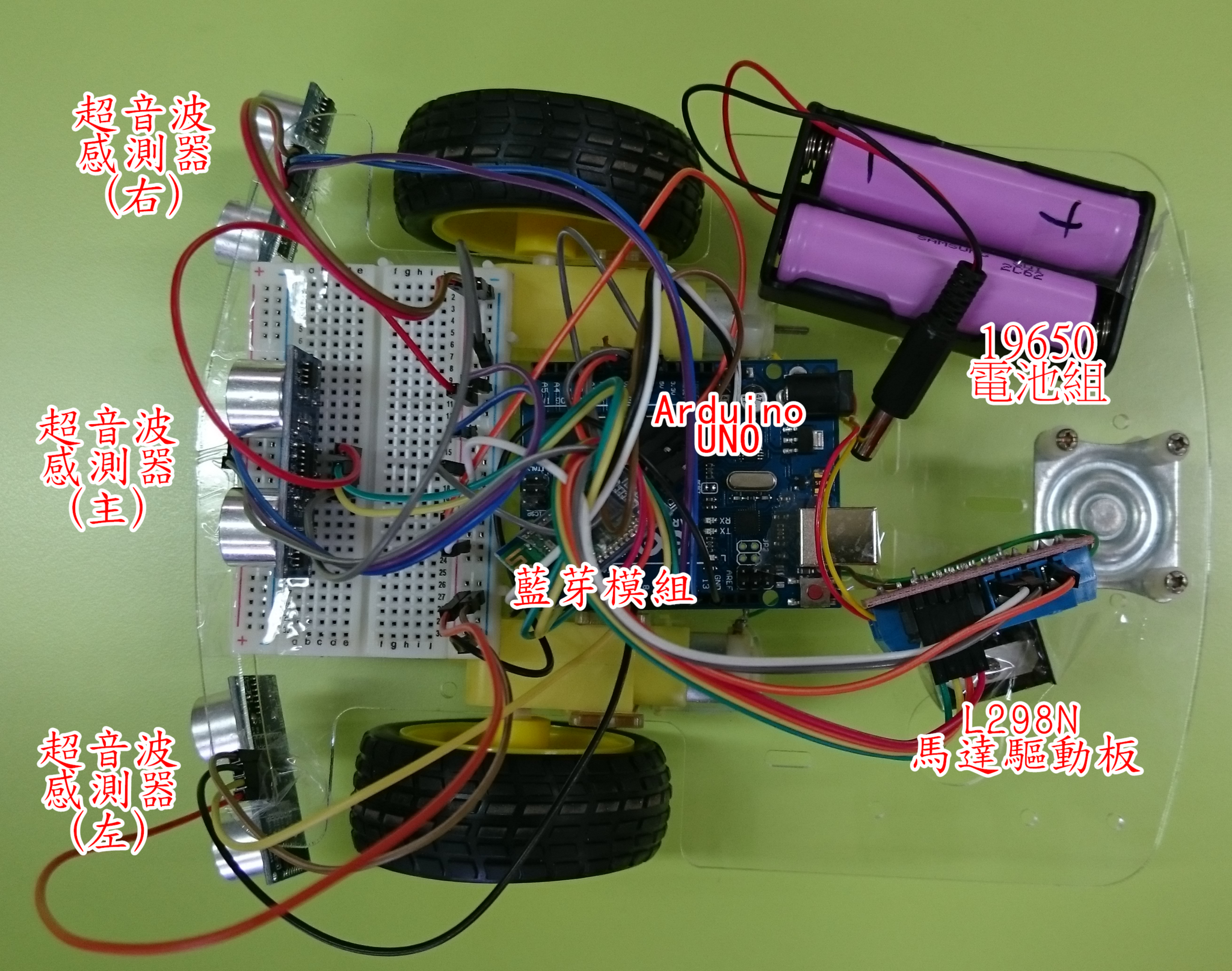
主要架構如下圖:(超音波感測器這次沒有用到)
紅外線避障模組原理及詳細接線,請參考WFduino第十五課(主動式紅外線感測器)
自走車控制原理及詳細接線,請參考WFduino第二十課遙控車
藍芽連線設定及詳細接線,請參考WFduino藍芽連線
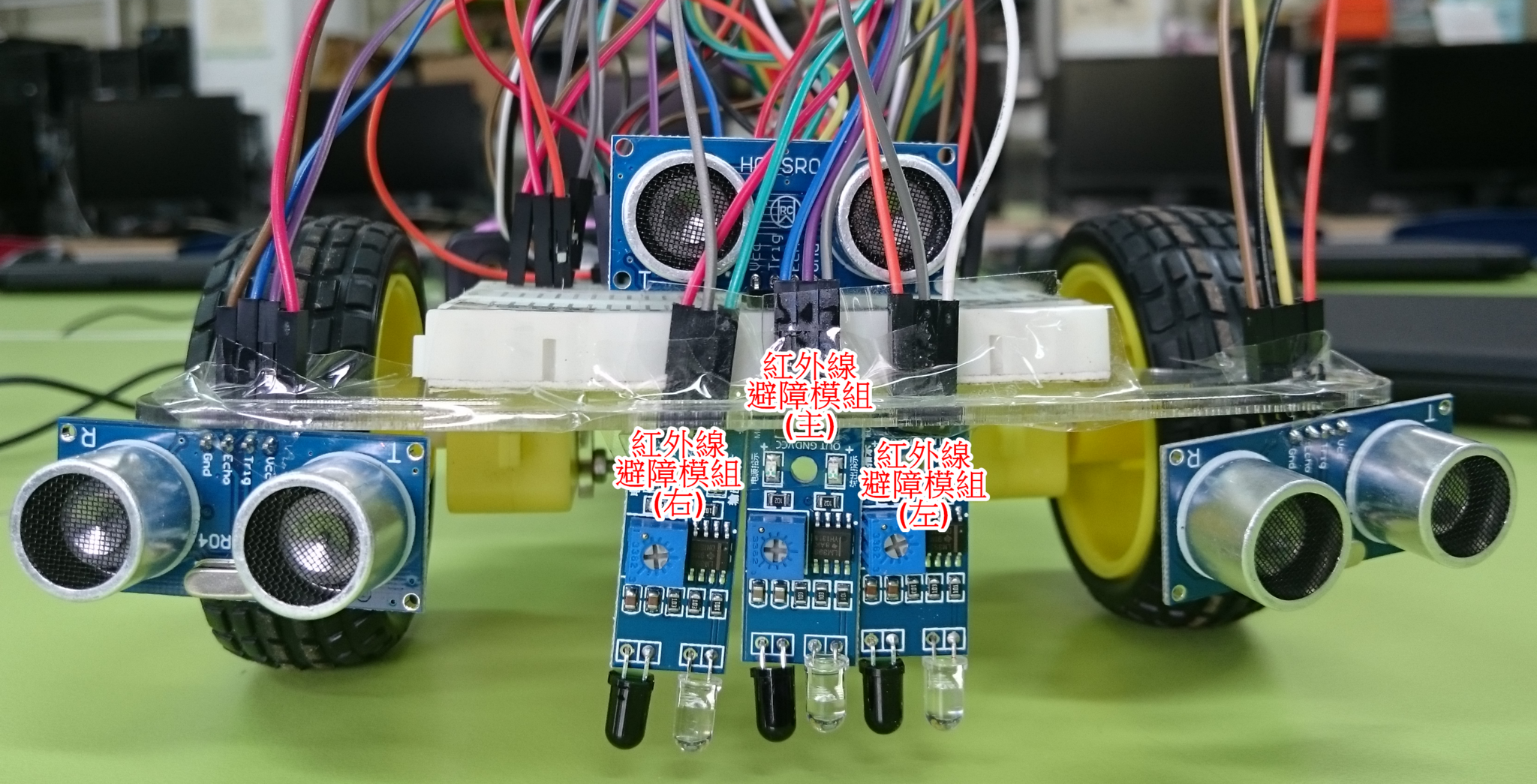
使用3組紅外線避障模組,訊號輸入端分別接類比腳位A0、A1、A2
馬達驅動板控制接線為數位腳位5、6、9、10(當作類比輸出)
藍芽模組接Arduino時,Rx和Tx要對接
1.因為有3組紅外線避障模組,所以設3個變數(主、左、右)來儲存紅外線避障模組偵測的結果。
2.設定腳位5、6、9、10為OUTPUT(輸出)(控制輪子轉動方向,12課)。
3.設定腳位A0、A1、A2為INPUT(輸入)。
4.重複執行紅外線避障模組偵測判斷。
5.如果紅外線避障模組遇到黑色,輸入訊號值大於900,遇到白色輸入訊號值小於200。
6.路線圖是白底,路線軌跡是黑色。主要偵測器在中間,兩旁分別命名為左、右。
7.正常情形主要偵測器對準黑色線,兩旁左、右偵測器對準白色紙張背景。
主偵測器是黑色(值>900),左、右偵測器是白色(值,200)
8.當路線轉彎或輪子偏轉時,偵測結果就會不同,需要做調整。
9.小車往左偏時,左、主偵測器變成白色(值<200),右偵測器變成黑色(值>900),需要左輪快一點、右輪慢一點,讓小車轉右邊回正。
10.小車往右偏時,右、主偵測器變成白色(值<200),左偵測器變成黑色(值>900),需要右輪快一點、左輪慢一點,讓小車轉左邊回正。
11.小車走太快超出黑線時,主、左、右偵測器都變成白色(值<200),就後退讓小車回到軌道。
註:
1.紅外線避障模組位置請適當調整。
2.程式部分請視實際狀況自行調整。
3.空曠場地可以調整類比輸出大一點,走快一點。場地狹小,類比輸出就要小一點,走慢一點,以免反應不及撞到。
4.因為接線關係,馬達正轉、反轉跟小車前進方向可能會有不同,各腳位的類比輸出值高低請參考下表調整。
直流馬達 | 旋轉方式 | IN1 | IN2 | IN3 | IN4 |
M1 | 正轉 | 高 | 低 | – | – |
反轉 | 低 | 高 | – | – | |
停止 | 低 | 低 | – | – | |
M2 | 正轉 | – | – | 高 | 低 |
反轉 | – | – | 低 | 高 | |
停止 | – | – | 低 | 低 |
程式下載:聲控無線自走車.sb2




